Project Spike is Bill Robertson's current robotics "work in
progress". Spike is a mixture of Labrador, german shepherd
and doberman pinscher. He was donated to Bill under the condition
that he would walk again.
When completed, spike will be a totally autonomous robot utilizing
SONAR, infrared and bump sensors to navigate. At this time, the
head, spinal column and pelvic bone are completed, including the
servo motor which pivots the neck/head. The motor controllers and
drivers have been built and tested, and preliminary software (C
code developed on a notebook and downloaded to the onboard 68HC11
microcontroller) has been developed and debugged. Still LOTS of
work to do! Special thanks go out to Heather Floyd, Dan Willems,
and Jonathan Nall for all of their help at the grave and rendering
sites.
|
Grave Site Collecting the bones (Click on picture to enlarge) |
 |
 Rendering Site Boiling the bones (Click on picture to enlarge) | |
|
Work at the Rendering Site interrupted by an angry bull (Click on picture to enlarge) |
 |
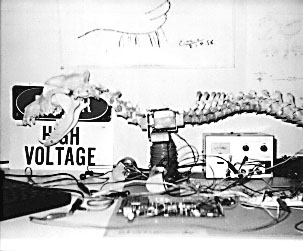 Spike at home Spike's spinal column with servo to enable neck movement (Click on picture to enlarge) | |
|
More bones Spike's remaining bones (Click on picture to enlarge) |
 |
